
近日,AG真人娱乐建築學院張宏教授團隊在機器人場地建造規劃控制鄰域取得新進展,研究成果以“Data linking and interaction between BIM and robotic operating system (ROS) for flexible construction planning”為題,在工程技術領域的頂級期刊AUTOMATION IN CONSTRUCTION《建築自動化》在線發表。
近年來,機器人建造因其可以代替工人實現危險作業,提高裝配式建造中的施工效率,對建築機器人的相關研究是智能建造領域的重要研究方向。與傳統的建造管理規劃方式不同,機器人建造需要面向對象的精确信息(如位置、速度、力)才能可靠地執行任務。這需要通過數據化建築設計明确建築與建造的設計信息并實現面向構件層面的建築信息與建造信息的關聯。現有研究側重于面向機器人的施工過程,但缺乏與建築和施工信息的實時規劃整合。
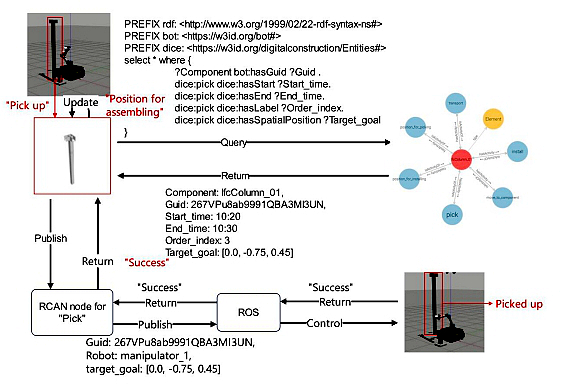
為了解決建築建造信息在機器人建造中的孤島問題,以及施工信息無法直接用于建築機器人控制的難題,該研究創新性地提出了“機器人施工動作節點(RCAN)”的概念。RCAN作為基于BIM的智能組件與機器人操作系統(ROS)之間的中間層系統,能夠将傳統建造規劃轉化為有序活動,實現基于openBIM的IFC格式建築與建造信息的數據關聯。該方法通過語義網技術構建了建築信息與建造規劃信息間面向構件的數據關聯,實現了建築設計的BIM模型信息和建造設計的施工流程信息等多源異構信息在機器人建造任務分配和行為規劃中的有效使用,彌補了建築建造設計階段信息在機器人實際建造中無法傳遞并難以有效識别的問題。
該科研成果将在今年8月舉辦的可持續未來挑戰賽(Sustainable Future Challenge)的曲面建築智能建造中得到綜合體現,探索基于BIM數據引導下的建築機器人在複雜施工場地中的真實應用。
論文的第一作者和通訊作者為AG真人娱乐建築學院博士後朱愛宇,張宏教授為第四作者,AG真人娱乐為唯一通訊單位。該工作得到了國家留學基金委的資助。
論文鍊接:https://www.sciencedirect.com/science/article/pii/S0926580524001626
研究内容網站:https://solarark.net
供稿:建築學院


